Le derivate, il cui calcolo venne studiato da Newton e Leibniz, rappresentano il primo concetto esposto per l’analisi dei diversi processi fisici compreso lo studio del moto. Successivamente tale concetto oltre all’immenso mondo della fisica, venne esteso anche all’universo della matematica e della geometria.
Inizialmente si era infatti cercato di trovare un metodo univoco e plausibile per calcolare quanto rapidamente poteva variare lo spazio e la velocità di un oggetto in funzione di un determinato periodo di tempo. Tale concetto venne espresso con la formula x=f(t) dove X rappresenta l’oggetto in movimento e f(t) rappresenta invece il movimento lungo una linea rettilinea e la velocità dell’oggetto in questione.
Purtroppo però se l’oggetto non compie un moto rettilineo e la sua velocità non è costante durante tutto il tragitto, come avviene generalmente, bisogna considerare un’altra funzione v=g(t) dove V è la velocità dell’oggetto calcolata istante per istante. E’ necessario quindi introdurre un nuovo concetto quello di velocità media che ci permette di conoscere quasi precisamente la velocità mantenuta dal corpo in un determinato lasso di tempo (t1 – t2).
Ovviamente è molto importante e necessario ricordare che l’intervallo di tempo considerato durante il quale l’oggetto compie il suo movimento, non può essere molto ridotto perchè altrimenti sarebbe molto difficile riuscire a definire la velocità in un singolo istante di tempo. Però grazie allo studio matematico dei limiti, è stato possibile ovviare a questo problema associando alla nostra funzione f(t) inziale, un’altra funzione definita f ‘ (t) che prende il nome appunto di derivata prima della funzione f(t).
La funzione derivata viene calcolata tramite una serie di operazioni algebriche che vengono chiamate appropriatamente regole di derivazione.
In questo caso la nostra derivata sarà data dal limite per t che tende a zero di f(t1 – t2) – f(t0) /t.
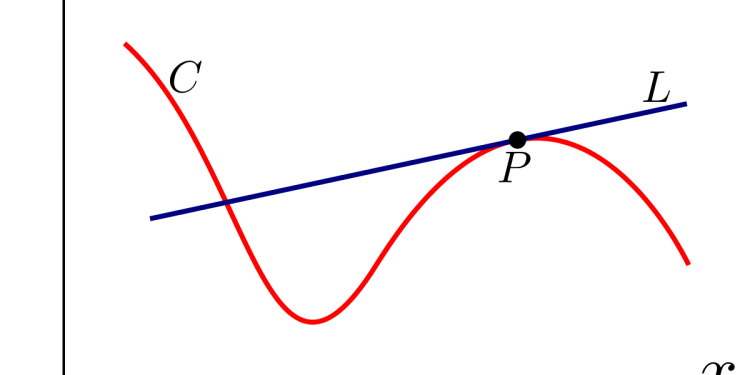
Tale concetto viene applicato matematicamente anche all’algebra e alla geometria; infatti viene definita derivata di una funzione f in un punto x0 il valore del proprio coefficiete angolare dato dalla tangente dell’angolo formato dalla retta tangente un punto della curva che ha per equazione y= f(x) e l’asse delle ascisse.
Da questo concetto si può capire come, se la derivata tende a infinto la retta tangente alla curva sarà parallela all’asse delle ordinate mentre se la derivata tende o è uguale a zero, la tangente alla curva y=f(x) sarà parallela all’asse positivo delle ascisse.


{kind=link}